
During the past weeks, things got intense as we had to prepare for the design freeze of our idea. This means that we had to make decisions about the size, form, material, and instruments used in our final product. We have spent a lot of time developing all the details in a 2D miro board. The following picture shows the Miro Board with all the details we used in our design freeze presentation.

After receiving and consolidating the feedback we received and conducting some more expert interviews we came one step closer to our final prototype.
We then started the 3D design of our prototype and discussed various ideas on how to build and present it in the final presentation. After experimenting with 3D printing and a 3D simulation we decided to go for the real deal instead and build a “real-life” version of ReNate and our complete system (which we still need a name for).
So without wasting much time we started to build a robot using Arduino Microcontroller for controlling the motors and connecting the sensors.

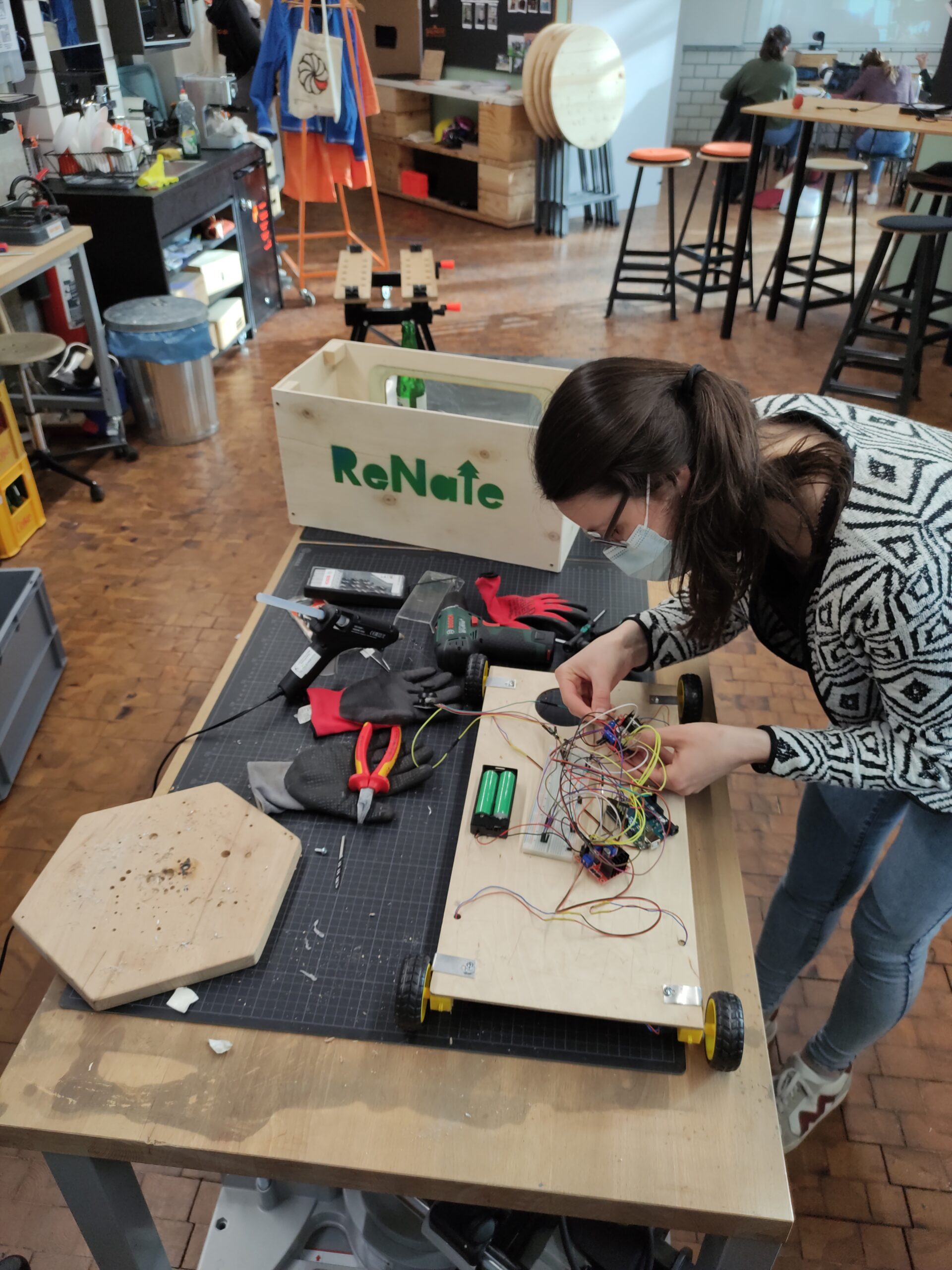

After just a couple of days of intensive work we made were able to build most of our final high-fidelity prototype. As we were really proud of our achievement, we of course had to spray paint our newly designed ReNate Logo on its corpus.


There is still much to do, so stay tuned as we keep you posted on our final process. Before you leave, watch our video of ReNate driving around below.
Looks great GTG! 🙂