
During the last two weeks, we mainly focused on our white paper, final presentation and prototype.
For the prototype we decided to build a fish drone with the following features/characteristics:
- The drone shouldn’t be waterproof and thus can’t move in water.
- Can recognize movements in front of it and show some kind of reaction when spotted a motion.
- Illustrate the locomotion with lights representing the water.
- Make a first impression of the design of the drone.
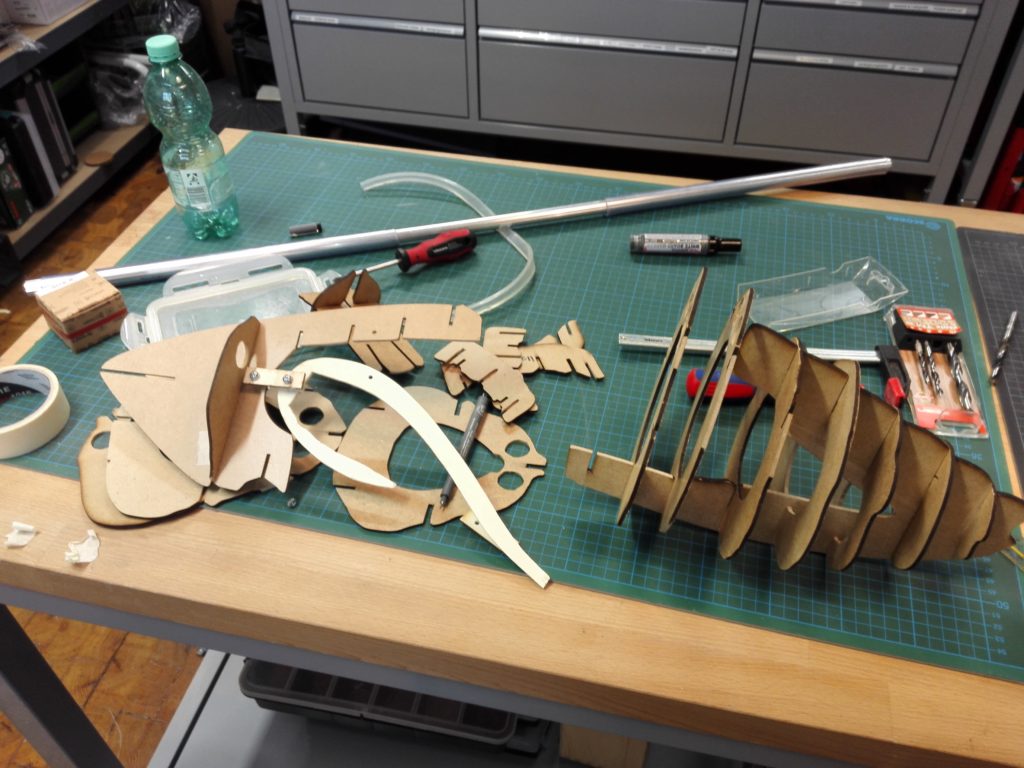
We started with the skeleton of the fish and used a laser cut template for a 3D goldfish. The template was a solid basis that we improved for our needs like stretch the body to get a longer fish and remove some unnecessary fins at the end.
The next step was to laser cut the parts and assemble them and check if they fit together. Our template was correct and we could slide the parts into each other smoothly.
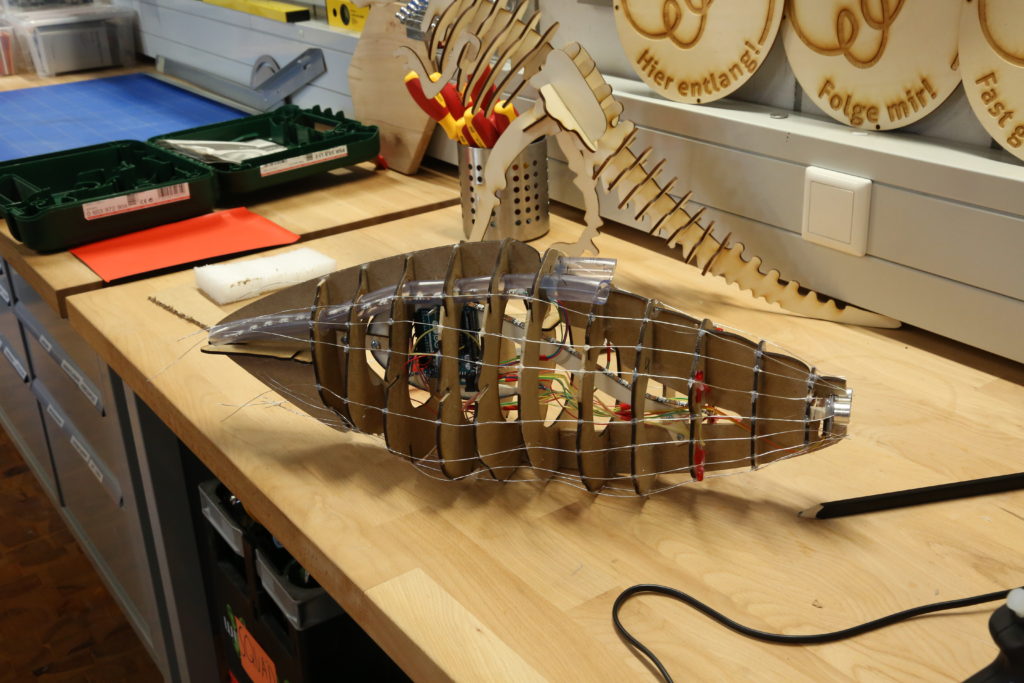
Now we had to plan the positions of electronics:
- One HC-SR04 ultrasonic sensor for recognizing motion
- Three Adafruit NeoPixel stripes for light effects
- Four red LEDs representing the sensors
- All cables for power and data
- Arduino UNO
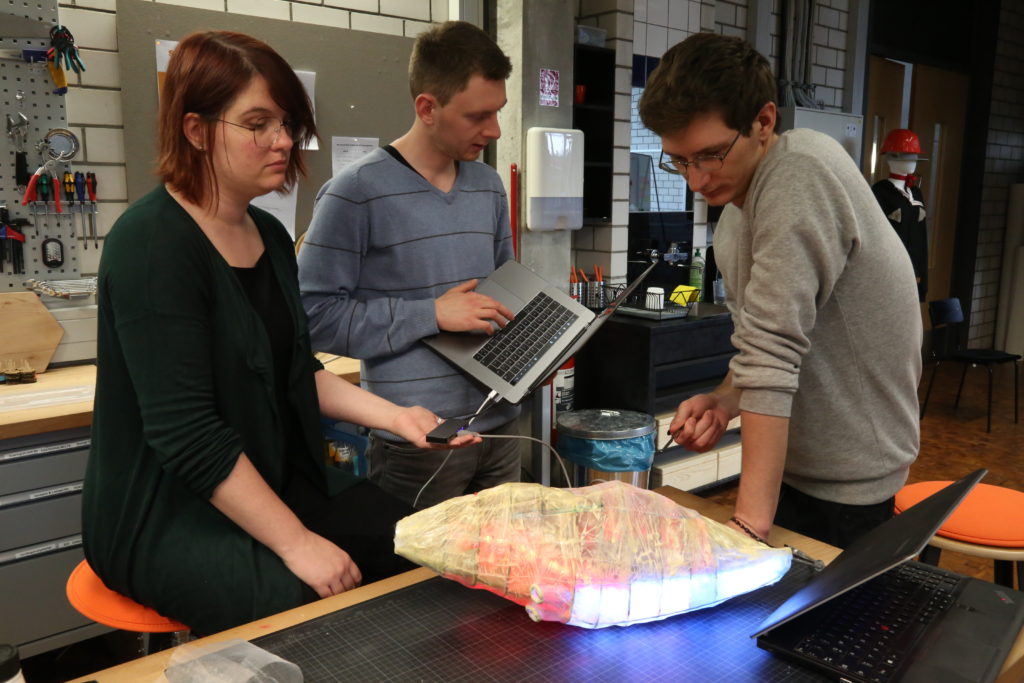
We prepared the skeleton for the electronics, installed them and had some texts, if they work. After a successful check, it was time to fix all parts with hot glue.
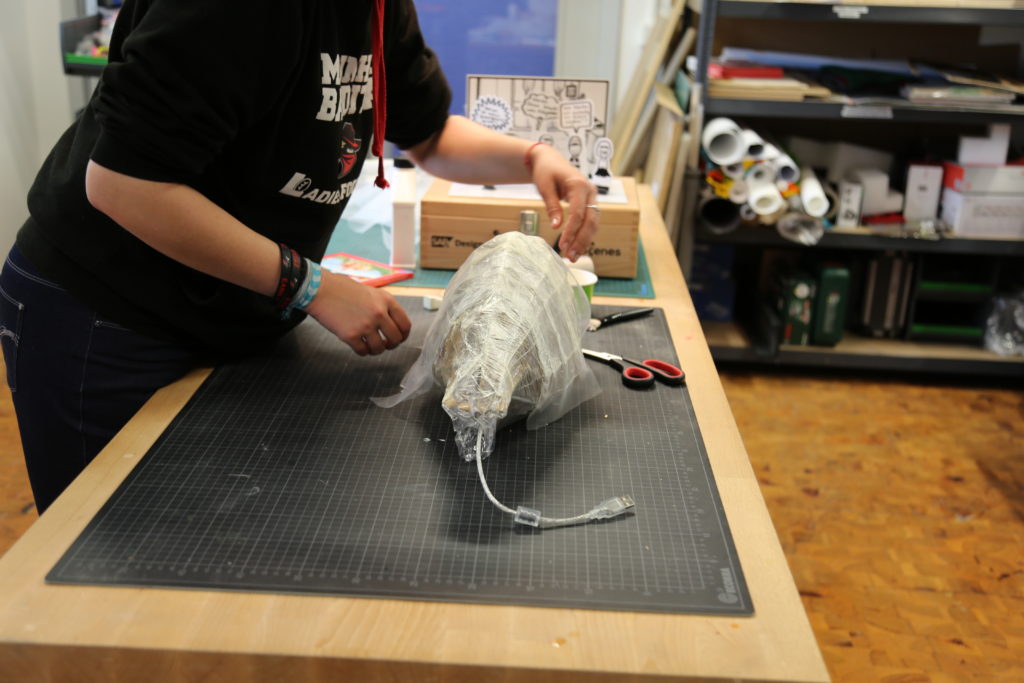
Next we gave our drone a skin with latex, used modelling clay for some details and painted it afterwards.
It was a lot of fun to design and make the drone and we are very proud of our drone and can’t wait to use it during our presentations!









well done guys! loved your video as well